
PONTOS-CHAVE
- A cirurgia auxiliada por robô agora está sendo usada em uma variedade especialidades cirúrgicas, incluindo cirurgias urológicas.
- Está associada a redução de perda sanguínea, dor pós-operatória e tempo de internação, permitindo ainda melhor visualização do campo cirúrgico quando comparado à cirurgia laparoscópica.
- O uso de um sistema robótico limita o acesso ao paciente no intraoperatório; então, o planejamento anestésico é essencial.
- O pneumoperitônio e a posição de Trendelenburg íngreme usada em cirurgias robóticas causam uma variedade de alterações fisiológicas e requerem considerações anestésicas especiais.
INTRODUÇÃO
O benefício da cirurgia minimamente invasiva levou ao aumento de uso nas últimas décadas. Os mais notáveis desses benefícios incluem incisões cirúrgicas menores, dor reduzida, perda de sangue reduzida, recuperação cirúrgica mais rápida e internações mais curtas. Contudo, essas técnicas requerem treinamento cirúrgico adicional e pode haver complicações relacionadas ao alcance limitado do movimento ou acesso do instrumento e a uma visão bidimensional inferior a ideal (Tabela 1).1,2
Para compensar isso, o interesse em sistemas cirúrgicos robóticos aumentou. Os robôs são projetados para permitir que o cirurgião controle seus instrumentos a distância com um grau de precisão mais alto e com melhor visualização de tecidos do que é possível com técnicas laparoscópicas padrão.
O sistema mais comumente usado é o robô cirúrgico Da Vinci™ (Intuitive Surgical, USA). Este consiste de 3 componentes principais: Um console mestre, um manipulador robótico cirúrgico, e uma torre de visualização. Sentado ao console mestre, o cirurgião tem a habilidade de controlar o manipulador cirúrgico (Figura 1). O console permite que o cirurgião visualize o campo cirúrgico em 3 dimensões, o que não é possível com procedimentos laparoscópicos padrão. O cirurgião tem controle de 2 atuadores que controlam os braços robóticos e pedais que permitem o controle da câmera, dos instrumentos e a diatermia.3
Com o cirurgião no console mestre, ainda se faz necessário um assistente com mãos e braços cirurgicamente lavados para inserir e mudar os instrumentos através das portas endoscópicas. A comunicação pode ser difícil entre os membros da equipe, então, os níveis de barulho na sala de cirurgia são mantidos em um mínimo. Microfones no console e alto-falantes nas torres de vídeo são usadas para amplificar a voz do cirurgião.
Apesar dos custos (aproximadamente £ 500.000), seu enorme tamanho e curva de aprendizado, há muitas vantagens no uso do sistema robótico. A imagem tridimensional permite que o cirurgião avalie e julgue a profundidade do campo de operação. O sistema automático filtra o tremor natural da mão do cirurgião e pode escalar os movimentos para um trabalho de precisão fina. O design do braço robótico permite uma aproximação de um punho humano normal, permitindo que o cirurgião controle precisamente o braço para alcançar ao redor e além dos tecidos de maneira que jamais seria conseguida usando-se uma técnica não-robótica. Todos esses recursos permitem uma cirurgia que, em última instância, resulta em perda sanguínea cirúrgica reduzida, redução na dor e internações mais curtas.

Tabela 1. Riscos e Benefícios da Cirurgia Laparoscópica Riscos e Benefícios da Cirurgia Laparoscópica
O sistema robótico tem sido usado em uma variedade de áreas especializadas, incluindo bariátricas, cirurgia geral, cirurgias cardiotorácica e urológica. Para este artigo, focaremos nas considerações anestésicas para a cirurgia auxiliada por robô para prostatectomias (CARP) e cistoprostatectomias.
PROCEDIMENTOS UROLÓGICOS ROBÓTICOS E O ANESTESISTA
Os problemas encontrados pelo anestesista podem ser divididos em fatores anestésicos, cirúrgicos e relacionados ao paciente.
Fatores Anestésicos
- Restrição espacial reduz o acesso ao paciente.
- É essencial garantir uma imobilidade completa do paciente durante o procedimento robótico.
- A resposta fisiológica à cirurgia laparoscópica (isto é, o pneumoperitônio) deve ser abordada.
- A gestão de dor é necessária.
Fatores cirúrgicos
- A ancoragem do robô requer que o paciente esteja posicionado corretamente para um uso preciso dos braços robóticos.
- Os braços robóticos volumosos podem causar dano a estruturas ao redor.
- Uma hemorragia importante pode ser insidiosa.
- A comunicação pode ser difícil enquanto o cirurgião estiver no console mestre.

Figura 1. O console mestre onde os cirurgiões estão controlando o sistema cirúrgico robótico distantes do paciente na sala de cirurgia. O console também pode ser usado para fins de treinamento.
Fatores do Paciente
- Uma posição de Trendelenburg íngreme por duração prolongada pode elevar à aumento da pressão intracraniana e causar edema facial e orbital.
- O risco de regurgitação aumenta durante a posição de Trendelenburg íngreme. O risco de lesão renal deve ser avaliado.
- Esses fatores podem ser abordados com uma abordagem sistemática para conduzir o ato anestésico durante a avaliação préoperatória, manejo intraoperatório e período pós-operatório.
PRÉ-OPERATÓRIO
Após uma avaliação padrão, pacientes de alto risco devem ser identificados. Infecções do trato urinário devem ser tratadas e deve-se fazer um teste com tira reativa de urina quando da entrada do paciente. O procedimento robótico geralmente requer uma posição de Trendelenburg íngreme e um pneumoperitônio, que podem ter potenciais efeitos adversos na fisiologia do paciente. As contraindicações absolutas são raras, mas comorbidades do paciente, como obesidade mórbida, doença isquêmica ou vascular cardíaca grave, doença respiratória significativa, ou pressão intracraniana aumentada são consideradas contraindicações relativas ao uso do sistema robótico, e esses pacientes devem ser considerados para procedimentos abertos. O risco adicional de perfusão renal reduzida e lesão durante o procedimento deve ser considerado naqueles com função renal comprometida.
INTRAOPERATÓRIO
Assim como com qualquer anestésico, deve-se implementar uma abordagem sistemática ao cuidado do paciente. Antes de iniciar qualquer anestésico, a lista de verificação de segurança cirúrgica da Organização Mundial da Saúde (OMS) deve ser efetuada para cada paciente.
Via aérea
A intubação endotraqueal é obrigatória para procedimentos robóticos para proteger a via aérea do risco de aspiração devido à pressão intra-abdominal aumentada e à posição de Trendelenburg íngreme. Também permite um melhor controle de ventilação no intraoperatório.
Respiração
A posição de Trendelenburg combinada ao pneumoperitônio causa restrição da respiração diafragmática devido à dor e movimento do conteúdo abdominal em direção à extremidade superior. Pode causar migração endobrônquica do tubo endotraqueal, resultando em colapso de pulmão não-ventilado e hipoxemia.
Fisiologicamente, o posicionamento combinado ao pneumoperitônio causa uma redução em capacidade residual funcional e complacência pulmonar. Em pacientes suscetíveis, isso pode levar a hipóxia; então, uma estratégia de ventilação apropriada é necessária. Recomendamos a aplicação de pressão expiratória final positiva para prevenir a atelectasia e conseguir volumes correntes de 6 a 8 ml/kg. Descobriu-se que a ventilação controlada por pressão resulta em maior complacência dinâmica e pressão de via aérea de pico inspiratório mais baixa, comparado com ventilação controlada por volume.
Circulação
Deve-se garantir um acesso venoso de grande calibre, pois a perda sanguínea em larga escala pode ser um agravante raro, e os fluidos devem ser anexados a um fluido mais quente. O acesso intravenoso deve ser garantido com extensões antes de se começar o procedimento, pois o acesso ao paciente é limitado durante a cirurgia. O cateterismo uretral é obrigatório, e um cateter deve ser inserido antes de se iniciar o procedimento, geralmente pela equipe cirúrgica urológica.
O monitoramento completo de rotina é exigido e o monitoramento invasivo da pressão arterial deve ser usado para medidas precisas e para permitir o monitoramento de gases sanguíneos e hemoglobina, pois a perda sanguínea importante pode ser insidiosa. A bradicardia e, potencialmente, paradas cardíacas podem ocorrer mediante a iniciação do pneumoperitônio, então deve-se prever isso e qualquer bradicardia deve ser tratada de imediato com drogas antimuscarínicas, como atropina. O acesso venoso central geralmente não é necessário, a menos que as comorbidades do paciente o exijam.
O sistema cardiovascular também é afetado pelo posicionamento do paciente e a aplicação de um pneumoperitônio resulta em um aumento da pressão venosa central, pressão arterial pulmonar, e pressão de capilar pulmonar, com uma diminuição na frequência cardíaca. Enquanto a posição de Trendelenburg aumenta o retorno venoso e pode aumentar o débito cardíaco, a compressão da aorta pelo pneumoperitônio causa um aumento na resistência vascular sistêmica. O débito cardíaco é, portanto, reduzido devido a um aumento na resistência vascular sistêmica e redução no volume sistólico. Isso leva a um aumento na demanda miocárdica de oxigênio e, portanto, é necessário ter cuidado com pacientes com uma reserva cardíaca reduzida ou barorreflexo reduzido (consulte a Tabela 2). Em alguns pacientes, o desarranjo fisiológico pode ser tal que é necessário converter o procedimento para uma abordagem aberta ou abandoná-lo completamente.6
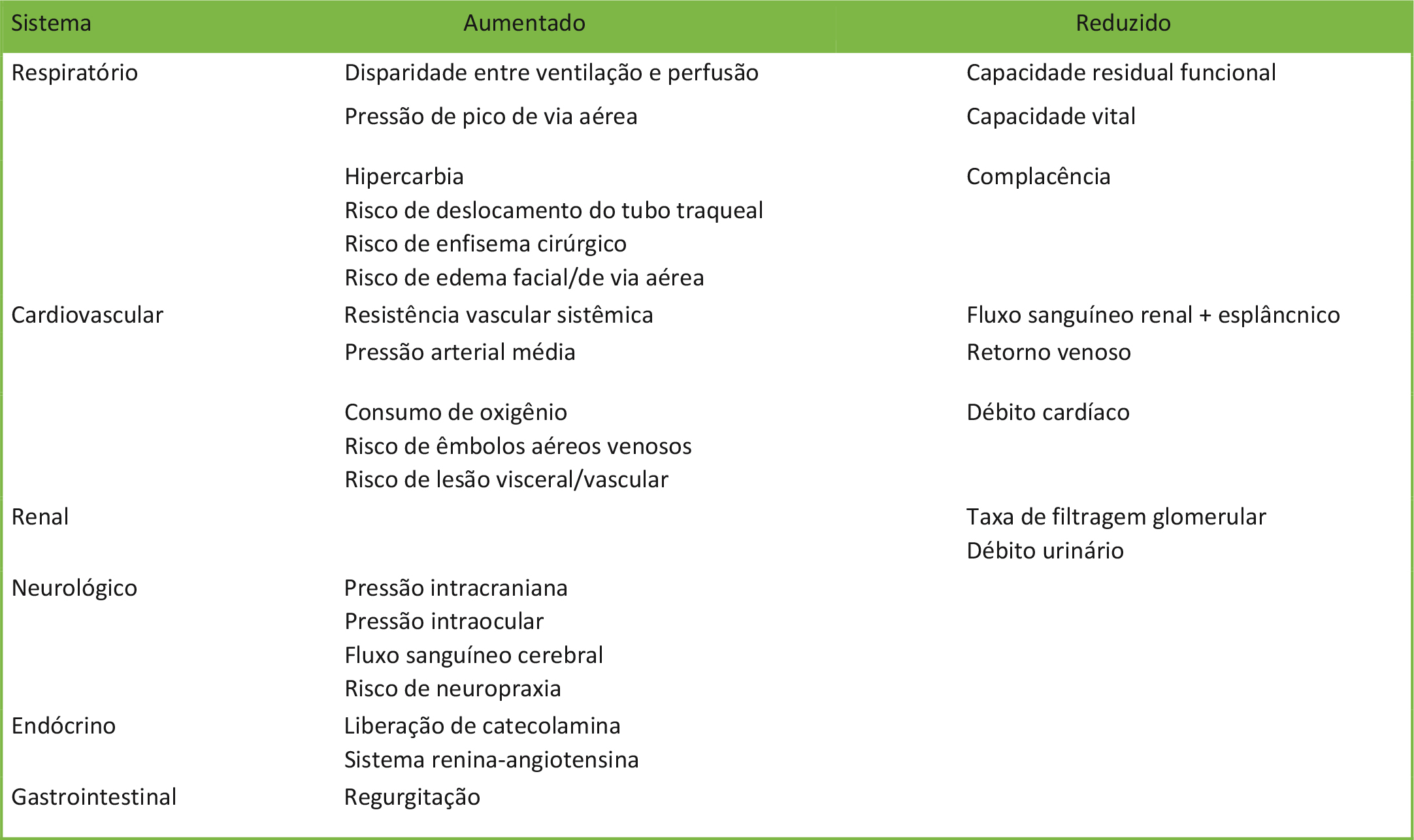
Tabela 2. Efeitos fisiológicos do Pneumoperitônio
Incapacidade (Manutenção de Anestesia e Analgesia)
As pressões intracraniana e intraocular também aumentam devido à drenagem venosa reduzida e à posição de Trendelenburg íngreme, e podem resultar em perfusão cerebral diminuída e edema facial ou orbital. Paciente com pressões intraocular ou intracraniana aumentadas conhecidas, como os que têm glaucoma ou hidrocefalia, devem ser manejados adequadamente. Essas medidas podem incluir ventilação controlada para evitar hipercapnia ou discussão com o cirurgião para reduzir a pressão de insuflação, ou escolher outra técnica cirúrgica para o procedimento.
A manutenção adequada da anestesia pode incluir agentes voláteis como o sevoflurano ou desflurano, com seu rápido perfil de recuperação. Contudo, o anestésico total intravenoso usando propofol pode ser considerado com uma alternativa, dado seu perfil favorável em cirurgia oncológica.7
Além da anestesia geral, uma abordagem multimodal à analgesia deve ser implementada. Assim como a analgesia intravenosa, as técnicas anestésicas locais como a infiltração cirúrgica local, bloqueio do plano transverso abdominal ou técnicas similares devem ser utilizadas. Outras instituições, como a nossa, usam técnicas como a analgesia caudal imediatamente após a indução da anestesia geral a fim de fornecer alívio efetivo da dor pós-operatória.8
Para cistoprostatectomias, as epidurais podem ser utilizadas e são inseridas antes da indução. Descobriu-se que a analgesia epidural reduz a pressão inspiratória de pico de via aérea, melhora a complacência dinâmica e permite uma melhor oxigenação e concentrações mais baixas de lactato. No pós-operatório, o uso sistêmico de opioides é diminuído e há uma redução nas complicações gastrointestinais como do íleo e constipação. As taxas de trombose venosa nos membros inferiores também são reduzidas. Contudo, o uso de epidurais pode resultar em um bloqueio alto devido aos extremos do posicionamento, e a posterior mobilização do paciente pode ser atrasada devido ao bloqueio motor potencial causado pelo bloqueio epidural.
Ambiente (Tudo mais)
Um tubo nasogástrico não é essencial para os procedimentos CARP, mas pode reduzir o rico de regurgitação passiva induzida pela gravidade e lesão com ácido gástrico aos olhos enquanto na posição de Trendelenburg íngreme. Contudo, seu uso em cistoprostatectomias é necessário devido ao risco aumentado de íleo gástrico pós-operatório.10
Áreas vulneráveis devem ser adequadamente forradas e os membros não devem ser posicionados em ângulos extremos. Complicações neurológicas são raras, mas potencialmente devastadoras. As lesões podem incluir lesão do plexo braquial, especialmente se as amarras dos ombros forem usadas, e neuropatia cutânea femoral lateral causada pela posição da litotomia. A hipotensão prolongada também deve ser evitada, pois pode exacerbar úlceras de pressão e lesões neurológicas. As abrasões córneas são a complicação ocular mais comum; então, os olhos devem ser tapados e cobertos, e deve-se ter cuidado para evitar edema orbital restringindo potencialmente os fluidos intravenosos e minimizando a posição de Trendelenburg.11

Figura 2. Paciente posicionada na posição de Trendelenburg íngreme dentro da sala anestésica antes de ser transferido para a sala de cirurgia. As áreas de pressão estão forradas e os braços estão enrolados com as linhas para fora da área forrada, para evitar inchaço.
Os braços do paciente devem ser envolvidos confortavelmente para os lados, garantindo que todas as linhas sejam forradas primeiro para evitar lesões por pressão. Os pacientes devem ser colocados em um colchonete não-deslizante para evitar que eles deslizem da mesa durante o procedimento. Pode ser necessário usar ombreiras e tiras para os ombros. Meias antitrombóticas e compressão pneumática intermitente devem ser usadas no intraoperatório para prevenir trombose venosa profunda. Um cobertor de ar aquecido deve ser aplicado.
Como verificação final do posicionamento apropriado, o paciente deve ser colocado em uma posição íngreme com a cabeça na parte mais baixa antes de se ancorar o robô para confirmar se a preparação foi adequada e se o paciente não é visto se movendo durante esta simulação de posicionamento cirúrgico (v. Figura 2).
Na sala de cirurgia, o paciente é cuidadosamente posicionado e o robô é deslizado até a posição entre as pernas do paciente. O assistente (com mãos e braços lavados para a cirurgia) coloca o trocarte via uma incisão umbilical e induz o pneumoperitônio. O paciente é colocado na posição de litotomia com uma Trendelenburg íngreme de até 30º a 45°, com uma posição mais íngreme para procedimentos CARP. Angulações menores de Trendelenburg podem oferecer melhor equilíbrio entre a visualização cirúrgica e o comprometimento fisiológico do paciente.
Após o robô ser ancorado (v. Figura 3), qualquer movimento ou tosse do paciente pode levar a dilaceração ou perfuração das vísceras. Por isso, deve-se considerar um relaxamento muscular meticuloso ou uma infusão de remifentanil, pois isso é crítico para que o paciente permaneça completamente imóvel. A posição da mesa não deve ser mudada até que os instrumentos cirúrgicos sejam desengatados. Como discutido anteriormente, uma boa comunicação entre a equipe cirúrgica é vital para bons resultados no cuidado ao paciente. Microfones e alto-falantes dentro do sistema robótico permitem que a voz do cirurgião seja ouvida por todos os membros da equipe. Quem estiver envolvido em cirurgias robóticas deve estar ciente de ter que lidar com emergências tais como desengate dos braços robóticos em uma parada cardíaca, e esses treinos podem ser praticados em simulações.
O fluido intraoperatório deve ser restrito para reduzir o edema facial e das vias aéreas e a produção de urina, que podem impactar o campo cirúrgico antes da anastomose uretral. A hipertensão deve ser manejada a fim de controlar a perda sanguínea e prevenir o obscurecimento do campo visual. Após a formação da anastomose, os fluidos intravenosos podem ser dados conforme requerido e a analgesia deve ser dada como preparação para a extubação.
PÓS-OPERATÓRIO
Após a remoção dos braços robóticos, qualquer bloqueio neuromuscular deve ser revertido. Edema cerebral e laríngeo deve ser percebido e a extubação deve ser realizada apenas se for segura, após verificar a presença de um vazamento com deflação do balonete do tubo endotraqueal.
Complicações pós-operatórias são raras e normalmente definidas pelas comorbidades do paciente. Pacientes submetidos a cistoprostatectomias devem idealmente ser manejados em unidades de alta dependência, ou com um nível semelhante de cuidado. A complicação cirúrgica mais comum é o íleo gástrico. O atraso no retorno da motilidade gastrointestinal pode resultar em dor, distensão abdominal, náusea e vômito, e deve ser manejado imediatamente para prevenir mais complicações. O manejo inclui a descompressão gástrica via tubo nasogástrico, hidratação por fluido intravenoso com reposição de eletrólitos, e, em um número muito pequeno de casos, intervenção cirúrgica se ocorrer perfuração abdominal.

Figura 3. Robô ancorado, mostrando o acesso limitado ao paciente. O espaço dentro da sala de cirurgia também fica reduzido.
A transfusão de sangue normalmente não é exigida, pois a perda de sangue intraoperatória é muito baixa, mas uma hemorragia significativa pode ser insidiosa e qualquer saída de drenagem deve ser monitorada. A restrição de fluidos intraoperatórios e o fluxo sanguíneo renal reduzido devido às pressões intra-abdominais aumentadas podem predispor o paciente a lesão renal pós-operatória. Os pacientes, portanto, devem receber hidratação por fluido intravenoso durante a noite e serem monitorados em relação a hemorragias e deterioração da função renal durante o período pós-operatório.
A dor é comparável à da cirurgia laparoscópica convencional, mas a dor pélvica profunda continua sendo um problema. A analgesia multimodal (utilizando a escada de degraus da OMS) deve ser administrada. Anti-inflamatórios não-esteroides são geralmente evitados devido ao risco de lesão renal pós-operatória. Uma pequena porcentagem de pacientes requer opióides. O uso de anestesia regional como analgesia espinhal ou caudal para pacientes de CARP tem levado a um menor uso sistêmico de opióides no pós-operatório
Houve relatos de síndrome compartimental de membros inferiores induzidos por isquemia após uma litotomia prolongada devido à redução na pressão arterial e no fluxo sanguíneo. Isso torna necessário avaliar os compartimentos no pós-operatório e prevenir a hipotensão intraoperatória.3
Deve-se administrar heparina de baixo peso molecular conforme os pacientes forem considerados de alto risco para eventos tromboembólicos pós-operatórios.
Drenos cirúrgicos, tubos nasogástricos e cateteres urinários devem ser removidos após revisão pela equipe cirúrgica. A analgesia oral deve ser iniciada logo que a rota enteral estiver disponível, e a analgesia de epidurais, caso usada, não é mais requerida. É vital que os pacientes tenham aberto o intestino, e isso deve ser monitorado. Laxativos podem ser requeridos dependendo da orientação da equipe cirúrgica. Os pacientes devem ser estimulados a se mobilizarem logo que possível para melhorar sua recuperação e potencializar uma alta mais segura do hospital.
RESUMO
- A cirurgia auxiliada por robô envolve o cirurgião operando por meio de um console distante do paciente com um assistente cirurgicamente lavado ao lado do paciente.
- Está associado à redução da perda de sangue e da dor, e a uma redução no tempo de internação.
- O pneumoperitônio e uma posição de Trendelenburg íngreme podem causar várias complicações, o que pode ser prevenido por meio de uma meticulosa anestesia perioperatória e a uma melhor técnica cirúrgica.
- Uma boa comunicação entre a equipe cirúrgica é vital para bons resultados no cuidado ao paciente; por exemplo, o uso de treinos práticos, como aqueles para desengate eficiente do robô em uma emergência, é importante.
- A analgesia multimodal é requerida para manejo da dor pós-operatória.
REFERÊNCIAS
- Lee J. Anesthetic considerations for robotic surgery. Korean J Anesthesiol. 2014;66(1):3-11.
- Hayden P, Cowman S. Anaesthesia for laparoscopic surgery. Cont Educ Anaesth Crit Care Pain. 2011;11(5):177-180.
- Irvine M, Patil V. Anaesthesia for robot-assisted laparoscopic surgery. Cont Educ Anaesth Crit Care Pain. 2009;9(4):125129.
- Danic M, Chow M, Alexander G, et al. Anesthesia considerations for robotic-assisted laparoscopic prostatectomy: a review of 1,500 cases. J Robot Surg. 2007;1(2):119-123.
- Choi EM, Na S, Choi SH, et al. Comparison of volume-controlled and pressure-controlled ventilation in steep Trendelenburg position for robot-assisted laparoscopic radical prostatectomy. J Clin Anesth. 2011;23:183-188.
- Naylor JM, Chow CM, McLean AS, et al. Cardiovascular responses to short-term head-down positioning in healthy young and older adults. Physiother Res Int. 2005;10(1):32-47.
- Wigmore T, Mohammed K, Jhanji S. Long-term survival for patients undergoing volatile versus IV anesthesia for cancer surgery: a retrospective analysis. Anesthesiology. 2016;124(1):69-79.
- Kao S, Lin C. Caudal epidural block: an updated review of anatomy and techniques. BioMed Res Int. 2017. doi: 10.1155/ 2017/92171459.
- Nimmo S, Harrington L. What is the role of epidural analgesia in abdominal surgery? Cont Educ Anaesth Crit Care Pain. 2014;14(5):224-229.
- Chang SS, Baumgartner RG, Wells N, et al. Causes of increased hospital stay after radical cystectomy in a clinical pathway setting. J Urol. 2002;167(1):208-211.
- Maerz DA, Beck LN, Sim AJ, et al. Complications of robotic-assisted laparoscopic surgery distant from the surgical site. Br J Anaesth. 2017;118(4):492-503.
This work by WFSA is licensed under a Creative Commons Attribution-NonCommercial-NoDerivitives 4.0 International License. To view this license, visit https://creativecommons.org/licenses/by-nc-nd/4.0/