General Topics

PUNTOS CLAVE
- La cirugía robótica se está usando en diferentes especialidades quirúrgicas, incluyendo las cirugías urológicas.
- Se ha asociado con reducción de la pérdida sanguínea, el dolor posoperatorio y la estancia hospitalaria, y también permite mejor visualización del campo quirúrgico comparada con la cirugía laparoscópica estándar.
- El uso de un sistema robótico limita el acceso a los pacientes en el intraoperatorio, por tanto es esencial hacer un plan anestésico meticuloso.
- El neumoperitoneo y la posición trendelenburg que se usan en cirugía robótica causan una variedad de cambios fisiológicos y requieren consideraciones anestésicas especiales.
INTRODUCCION
Los beneficios de la cirugía mínimamente invasiva han llevado a mayor uso de ésta en las últimas décadas. Los beneficios más notables son la incisión quirúrgica más pequeña, la reducción del dolor, menor pérdida sanguínea, recuperación quirúrgica más rápida y menor estancia hospitalaria. Sin embargo, estas técnicas requieren entrenamiento quirúrgico adicional y pueden resultar complicaciones relacionadas con el limitado rango de movimiento del instrumental quirúrgico o menor acceso al campo y una subóptima vista bidimensional (tabla 1).1,2
Debido a estos inconvenientes, cada vez ha aumentado más el interés en los sistemas quirúrgicos robóticos. Los robots están diseñados para permitir al cirujano el control a distancia de sus movimientos e instrumentos quirúrgicos, con un grado más alto de precisión y con mejor visualización de los tejidos que las técnicas laparoscópicas estándar.
El sistema usado más comúnmente es el robot quirúrgico da Vinci™ (Intuitive Surgical, USA). Consiste de tres componentes principales: una consola de control, el operador robótico y una torre de visualización. Sentado en la consola master, el cirujano tiene la capacidad de controlar el operador robótico (figura 1). La consola permite al cirujano visualizar el campo quirúrgico en tres dimensiones, lo cual no es posible con los procedimientos laparoscópicos estándar. El cirujano tiene control de los 2 transmisores de fuerza que controlan los brazos del robot y los pedales para el manejo de la cámara, los instrumentos y la transferencia de calor.3
Con el cirujano en la consola de control, igualmente se requiere un asistente que, previo lavado quirúrgico, inserte y cambie los instrumentos a través de los puertos endoscópicos. Los niveles de ruido en el quirófano deben ser mínimos para facilitar la comunicación entre los miembros del equipo. Los micrófonos dentro de la consola y los parlantes dentro de las torres de video se usan para intensificar la voz del cirujano.
A pesar de los costos (aproximadamente £500,000), su gran tamaño y la curva de aprendizaje requerida, hay muchas ventajas de usar un sistema robótico. La imagen tridimensional permite al cirujano apreciar y calcular la profundidad en el campo quirúrgico. El sistema automáticamente filtra el temblor manual normal del cirujano y puede ajustar los movimientos para lograr un trabajo de fina precisión. El diseño del brazo robótico facilita la aproximación de la muñeca del cirujano, lo cual permite a éste controlar precisamente el brazo para alcanzar los tejidos de una forma que nunca podría ser lograda usando una técnica no robótica. Todas estas características reducen la pérdida sanguínea, el dolor y la estancia hospitalaria.3,4
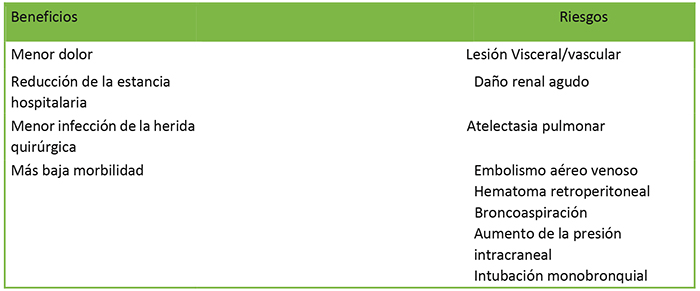
Tabla 1. Beneficios y riesgos de la cirugía laparoscópica
El sistema robótico se ha usado en diversas especialidades quirúrgicas, incluyendo cirugía bariátrica, general, cardiotorácica y urológica. En este artículo nos enfocaremos en las consideraciones anestésicas para cirugía robótica en prostatectomía (RALP) y cistoprostatectomía.
CIRUGÍAS ROBÓTICAS UROLÓGICAS Y EL ANESTESIÓLOGO
Los temas de interés para el anestesiólogo se pueden dividir en factores del paciente, quirúrgicos y anestésicos.
Factores anestésicos
- La restricción espacial limita el acceso al paciente
- Es esencial una adecuada inmovilidad y/o relajación del paciente durante el procedimiento robótico
- Se debe tener en cuenta la respuesta fisiológica a la cirugía laparoscópica (el neumoperitoneo)
- Adecuado tratamiento del dolor
Factores quirúrgicos
- El sistema robótico requiere la correcta posición del paciente para usar con precisión los brazos robóticos
- Los brazos robóticos voluminosos pueden causar daños a las estructuras adyacentes
- Puede ocurrir hemorragia significativa
- La comunicación puede ser difícil mientras el cirujano está en la consola de control
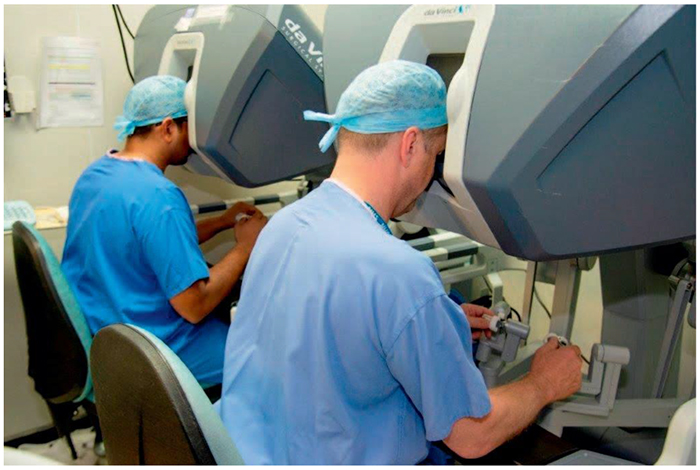
Figura 1. Consola de control donde los cirujanos manejan el sistema robótico a distancia del paciente que está en el quirófano. La consola puede usarse también para propósitos de entrenamiento.
Factores del paciente
- La posición de trendelenburg extrema por tiempo prolongado causa aumento de la presión intracraneal y edema facial y orbitario
- El riesgo de regurgitación en la posición de trendelenburg extrema
- También debe evaluarse el riesgo de daño renal
Estos factores se deben considerar y mitigarse mediante una aproximación anestésica sistemática en los períodos preoperatorio, intraoperatorio y posoperatorio.
PREOPERATORIO
Después de la evaluación estándar, deben identificarse los pacientes de alto riesgo. Es necesario tratar antes de la cirugía las infecciones del tracto urinario, y el día del ingreso realizar un examen rápido de orina. El procedimiento robótico usualmente requiere la posición trendelenburg extrema y el neumoperitoneo, los cuales pueden tener efectos adversos en la fisiología del paciente. Las contraindicaciones absolutas son raras pero algunas comorbilidades del paciente tales como obesidad mórbida, enfermedad cardíaca isquémica severa o valvular, enfermedad respiratoria significativa, o el aumento de la presión intracraneal se consideran contraindicaciones relativas para usar el sistema robótico y estos pacientes son candidatos a cirugía abierta. El riesgo adicional de la disminución de la perfusión y el daño renal durante el procedimiento se debe considerar en pacientes con alteración de la función renal.
INTRAOPERATORIO
Como con cualquier anestesia, debe implementarse una aproximación sistemática al cuidado del paciente. Debe hacerse la lista de chequeo de seguridad quirúrgica recomendada por la Organización Mundial de la Salud (WHO) antes de iniciar el procedimiento anestésico y en cada paciente.
Vía aérea
La intubación endotraqueal es la técnica de elección para proteger la vía aérea en procedimientos robóticos debido al aumento de la presión intrabdominal y a la posición Trendelenburg extrema. La intubación también permite una mejor ventilación en el intraoperatorio.
Respiración
La posición Trendelenburg combinada con el neumoperitoneo causa acortamiento diafragmático y desplazamiento cefálico del contenido abdominal. Esto puede causar migración endobronquial del tubo endotraqueal y llevar a colapso del pulmón no ventilado e hipoxemia.
Fisiológicamente, la posición y el neumoperitoneo reducen la capacidad residual funcional y la compliance pulmonar. En pacientes susceptibles, esto puede llevar a hipoxia de tal manera que se requiere una apropiada estrategia de ventilación. Recomendamos usar presión positiva al final de la espiración (PEEP) para prevenir atelectasias y lograr volúmenes tidal de 6 a 8 ml/kg. Se ha encontrado que la ventilación controlada por presión produce mayor compliance dinámica y menor presión inspiratoria pico, comparada con la ventilación controlada por volumen.5
Circulación
Debe obtenerse un acceso venoso de buen calibre, debido a que puede darse una pérdida sanguínea importante, aunque es una complicación rara. Además deben usarse líquidos calentados a temperatura corporal con un calentador para tal fin. El acceso intravenoso se debe asegurar con extensiones antes de iniciar el procedimiento ya que el acceso al paciente está limitado durante la cirugía. También debe pasarse una sonda vesical antes de la cirugía, lo cual lo hace usualmente el equipo de urología.
Se requiere monitoreo básico completo y se recomienda la monitorización invasiva de la presión arterial para tener mediciones más precisas y monitoreo de los gases sanguíneos y la hemoglobina para vigilar la pérdida sanguínea. La bradicardia y el paro cardíaco pueden ocurrir al iniciar el neumoperitoneo, por tanto debe anticiparse este riesgo y tratarse rápidamente toda bradicardia con antimuscarínicos como la atropina. El acceso venoso central usualmente no se requiere, a menos que las comorbilidades del paciente lo indiquen.
El sistema cardiovascular también se afecta por la posición del paciente y la aplicación del neumoperitoneo causa aumento en la presión venosa central, la presión de la arteria pulmonar y la presión en cuña capilar pulmonar, con una disminución compensatoria en la frecuencia cardíaca. Mientras la posición Trendelenburg aumenta el retorno venoso y el gasto cardíaco, la compresión de la aorta por el neumoperitoneo ocasiona un aumento de la resistencia vascular sistémica. Por tanto, el gasto cardíaco se reduce debido al aumento en la resistencia vascular sistémica y reducción del volumen de eyección. Esto lleva al aumento de la demanda de oxígeno miocárdico, por lo cual debe tenerse precaución en pacientes con baja reserva cardiaca o alteración del barorreflejo (tabla 2). En algunos pacientes, el daño fisiológico puede ser de tal magnitud que es necesario convertir el procedimiento a una técnica abierta o suspenderlo completamente.6
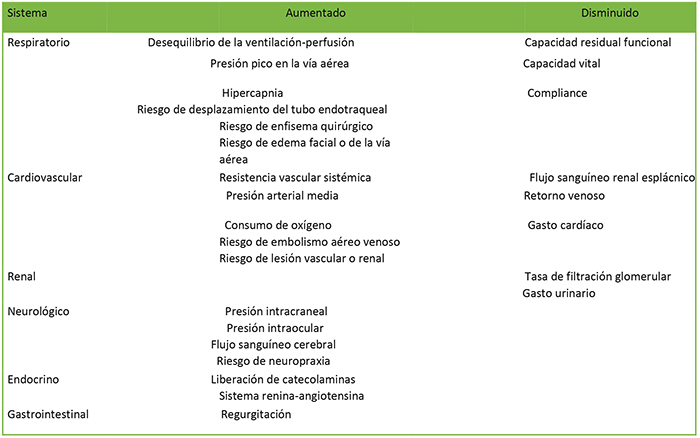
Tabla 2. Efectos fisiológicos del neumoperitoneo
Mantenimiento de la Anestesia y Analgesia
Las presiones intracraneal e intraocular se aumentan debido a reducción del drenaje venoso y la posición Trendelenburg extrema, lo cual puede causar reducción de la perfusión cerebral y edema orbitario o facial. Los pacientes que ya tienen diagnosticado el aumento de la presión intracraneal o intraocular, como aquellos con glaucoma o hidrocéfalo, se deben manejar apropiadamente. Estas medidas pueden incluir ventilación controlada para evitar la hipercapnia o dialogar con el cirujano para reducir la presión de insuflación, o escoger otra técnica quirúrgica para el procedimiento.
Las técnicas anestésicas pueden ser inhalatoria con sevoflurano o desflurano que tienen un perfil de recuperación rápida. Sin embargo, la anestesia total intravenosa (TIVA) con propofol se puede considerar como una alternativa dado su perfil favorable en cirugía oncológica.7
Además de la anestesia general, debe implementarse un manejo analgésico multimodal. Igual que la analgesia intravenosa, las técnicas anestésicas locales, tales como la infiltración local quirúrgica, el bloqueo del plano abdominal transverso (TAP), u otras técnicas similares deberían usarse. Otras instituciones como la nuestra, usan la técnica analgésica caudal inmediatamente después de la inducción anestésica para dar una analgesia posoperatoria efectiva.8
Para cistoprostatectomías, puede usarse analgesia epidural insertando el catéter antes de la inducción. Se ha descubierto que la analgesia epidural reduce la presión inspiratoria pico en la vìa aérea, aumenta la compliance dinámica, mejora la oxigenación y reduce las concentraciones de lactato. En el posoperatorio, reduce el consumo de opioides sistémicos, las complicaciones gastrointestinales como el íleo y la constipación y la trombosis venosa de miembros inferiores. Sin embargo, el uso de la epidural en el intraoperatorio puede causar bloqueo alto debido al trendelenburg extremo y retrasar la movilización del paciente.9
Otras consideraciones intraoperatorias
No es esencial usar una sonda nasogástrica para prostatectomías pero se puede reducir el riesgo de regurgitación pasiva inducida por la gravedad y la lesión ocular por ácido gástrico mientras se mantiene la posición trendelenburg extrema. Sin embargo, en cistoprostatectomías es mandatorio usarla por el mayor riesgo de íleo gástrico posoperatorio.10
Las áreas vulnerables se deben acolchar adecuadamente y las extremidades no deben posicionarse en ángulos extremos. Las complicaciones neurológicas son raras pero devastadoras. Las lesiones pueden incluir daño del plejo braquial, especialmente si se usan bandas en los hombros, y daño del nervio femorocutáneo lateral por la posición de litotomía. Debe evitarse la hipotensión prolongada porque puede exacerbar las úlceras por presión y las lesiones neurológicas. Las abrasiones corneales son la complicación ocular más común, por tanto deben protegerse los ojos con oclusión y acolchamiento; también debe evitarse el edema orbitario restringiendo los líquidos intravenosos y minimizando la posición trendelenburg.11

Figura 2. Paciente posicionado en posición Trendelenburg extrema dentro del cuarto anestésico antes de trasladarlo al quirófano. Las áreas de presión están protegidas y los brazos están envueltos con las líneas exteriorizadas para prevenir úlceras.
Los brazos del paciente deben envolverse y posicionarse a los lados del paciente, asegurándose que todas las líneas se aíslan bien para prevenir lesiones por presión. Los pacientes deben ponerse en una manta antideslizante para evitar que se deslicen de la camilla durante el procedimiento. Pueden requerirse correas en los hombros con este fin. Las medias antiembólicas y la compresión neumática intermitente se deben usar en el intraoperatorio para prevenir la trombosis venosa profunda. Se debe aplicar una manta de calentamiento de aire forzado.
Como un chequeo final de posicionamiento apropiado, el paciente debe ser puesto en posición trendelenburg extrema antes de asegurar el sistema robótico para confirmar que la preparación ha sido adecuada y que el paciente no se mueve durante la simulación de la posición quirúrgica (figura 2).
En el quirófano, el paciente se posiciona cuidadosamente y el robot se ubica entre las piernas del paciente. El asistente pone el trócar para la cámara a través de una incisión umbilical e induce el neumoperitoneo. El paciente es puesto en posición de litotomía con Trendelenburg extremo hasta 30 a 45 grados, con la posición más empinada para prostatectomías. La posición menos extrema puede ofrecer el mejor equilibrio entre la facilitación quirúrgica y el compromiso fisiológico del paciente.
Después de que el robot ha sido acomodado (figura 3), cualquier movimiento o esfuerzo tusígeno del paciente puede llevar a desgarro o punción de las vísceras. Por esta razón, se deben considerar la relajación muscular o la infusión de remifentanilo, ya que es crítico para el paciente que permanezca absolutamente inmóvil. La posición de la camilla quirúrgica no debe cambiarse hasta que los instrumentos quirúrgicos se hayan retirado. Como se discutió previamente, una buena comunicación entre el equipo quirúrgico es vital para lograr buenos resultados. Los micrófonos y los parlantes dentro del sistema robótico permiten escuchar la voz del cirujano por todos los miembros del equipo. Aquellos interesados en la cirugía robótica deberían ser conscientes de que en una situación de emergencia como un paro cardíaco, es necesario desacoplar rápidamente los brazos del robot, y que por tanto, estas situaciones de crisis requieren practicarse en escenarios de simulación.
Deben restringirse los líquidos intraoperatorios para disminuir el edema facial y de la vía aérea, y el gasto urinario, el cual puede impactar el campo quirúrgico antes de la anastomosis uretral. Tratar la hipertensión ayuda a controlar la pérdida sanguínea y a mantener el campo visual. Después de hacerse la anastomosis, pueden darse los líquidos intravenosos requeridos y una adecuada analgesia, antes de la extubación.
POSOPERATORIO
Después del desacople de los brazos robóticos, debe revertirse el bloqueo neuromuscular. Es necesario evaluar la presencia de edema laríngeo y cerebral, y sólo hacer la extubación si el anestesiólogo considera seguro hacerlo, después de verificar la presencia de escape de aire al desinsuflar el balón del tubo endotraqueal.
Las complicaciones posoperatorias son raras y usualmente asociadas a las comorbilidades del paciente. Quienes se someten a cistoprostatectomía deberían idealmente trasladarse a unidades de alta dependencia, o con un nivel de cuidado similar. La complicación quirúrgica más común es el íleo gástrico. El retraso en la recuperación de la motilidad gastrointestinal causa dolor, distensión abdominal náusea o vómito y debe tratarse rápidamente para evitar complicaciones. El manejo incluye descompresión gástrica con una sonda nasogástrica e hidratación con líquidos intravenosos y reemplazo de electrolitos. En un pequeño número de pacientes puede ocurrir una perforación intestinal y en estos casos se requiere una cirugía.

Figura 3. Robot ensamblado, mostrando el acceso limitado al paciente. El espacio dentro del quirófano también está reducido.
Normalmente no se requiere transfusión sanguínea debido a que las pérdidas son bajas, pero debe tratarse de monitorizar las pérdidas ya que una hemorragia significativa puede ser insidiosa en su presentación. La restricción intraoperatoria de líquidos y la reducción del flujo sanguíneo renal debido a aumento de la presión intrabdominal puede predisponer los pacientes a daño renal posoperatorio. Por tanto, deben recibir hidratación durante la noche previa y monitorizarse para detectar hemorragia o deterioro durante el posoperatorio.
El dolor es comparable al de la cirugía laparoscópica convencional pero el dolor pélvico profundo sí puede ser preocupante. Debe administrarse la analgesia multimodal (utilizando la escalera analgésica de la Organización Mundial de la Salud, OMS). Los antinflamatorios no esteroideos deben evitarse por el riesgo de daño renal posoperatorio. Un pequeño porcentaje de pacientes requiere opioides. El uso de analgesia regional espinal o caudal para prostatectomías ha reducido el uso de opioides sistémicos en el posoperatorio.
Ha habido reportes de isquemia de extremidad inferior inducida por síndrome compartimental después de litotomía prolongada debido a reducción del flujo sanguíneo. Esto implica la necesidad de valorar los compartimentos en el posoperatorio y prevenir la hipotensión intraoperatoria.3
Debe administrarse heparina de bajo peso molecular a los pacientes que se consideran de alto riesgo de eventos tromboembólicos posoperatorios.
Los drenes quirúrgicos y las sondas nasogástrica y vesical se deben retirar después de la revisión por el equipo quirúrgico. La analgesia oral debe iniciarse tan pronto como la vía oral se restablezca y la analgesia epidural, si se aplicó, usualmente se requiere poco. Es vital que los pacientes tengan el intestino activo y esto debe monitorizarse. Pueden requerirse laxantes según lo considere el equipo quirúrgico. Los pacientes deben animarse a movilizarse tan pronto como sea posible para acelerar su recuperación y posibilitar un alta más segura del hospital.
RESUMEN
- La cirugía asistida por robot implica que el cirujano opere a distancia a través de una consola y mediante un asistente en condiciones asépticas para el paciente.
- Se ha asociado con menor dolor, pérdida sanguínea y estancia hospitalaria.
- El neumoperitoneo y la posición Trendelenburg extrema pueden causar varias complicaciones, las cuales se pueden prevenir mediante una cuidadosa anestesia perioperatoria y adecuada técnica quirúrgica.
- Una buena comunicación entre el equipo quirúrgico es vital para lograr buenos desenlaces en el cuidado del paciente; por ejemplo, el entrenamiento práctico para desensamblar de forma eficiente el robot en una emergencia, es importante.
- El manejo del dolor posoperatorio requiere un abordaje con analgesia multimodal.
REFERENCIAS
- Lee J. Anesthetic considerations for robotic surgery. Korean J Anesthesiol. 2014;66(1):3-11.
- Hayden P, Cowman S. Anaesthesia for laparoscopic surgery. Cont Educ Anaesth Crit Care Pain. 2011;11(5):177-180.
- Irvine M, Patil V. Anaesthesia for robot-assisted laparoscopic surgery. Cont Educ Anaesth Crit Care Pain. 2009;9(4):125129.
- Danic M, Chow M, Alexander G, et al. Anesthesia considerations for robotic-assisted laparoscopic prostatectomy: a review of 1,500 cases. J Robot Surg. 2007;1(2):119-123.
- Choi EM, Na S, Choi SH, et al. Comparison of volume-controlled and pressure-controlled ventilation in steep Trendelenburg position for robot-assisted laparoscopic radical prostatectomy. J Clin Anesth. 2011;23:183-188.
- Naylor JM, Chow CM, McLean AS, et al. Cardiovascular responses to short-term head-down positioning in healthy young and older adults. Physiother Res Int. 2005;10(1):32-47.
- Wigmore T, Mohammed K, Jhanji S. Long-term survival for patients undergoing volatile versus IV anesthesia for cancer surgery: a retrospective analysis. Anesthesiology. 2016;124(1):69-79.
- Kao S, Lin C. Caudal epidural block: an updated review of anatomy and techniques. BioMed Res Int. 2017. doi: 10.1155/ 2017/92171459.
- Nimmo S, Harrington L. What is the role of epidural analgesia in abdominal surgery? Cont Educ Anaesth Crit Care Pain. 2014;14(5):224-229.
- Chang SS, Baumgartner RG, Wells N, et al. Causes of increased hospital stay after radical cystectomy in a clinical pathway setting. J Urol. 2002;167(1):208-211.
- Maerz DA, Beck LN, Sim AJ, et al. Complications of robotic-assisted laparoscopic surgery distant from the surgical site. Br J Anaesth. 2017;118(4):492-503.
This work by WFSA is licensed under a Creative Commons Attribution-NonCommercial-NoDerivitives 4.0 International License. To view this license, visit https://creativecommons.org/licenses/by-nc-nd/4.0/